{kind=link}
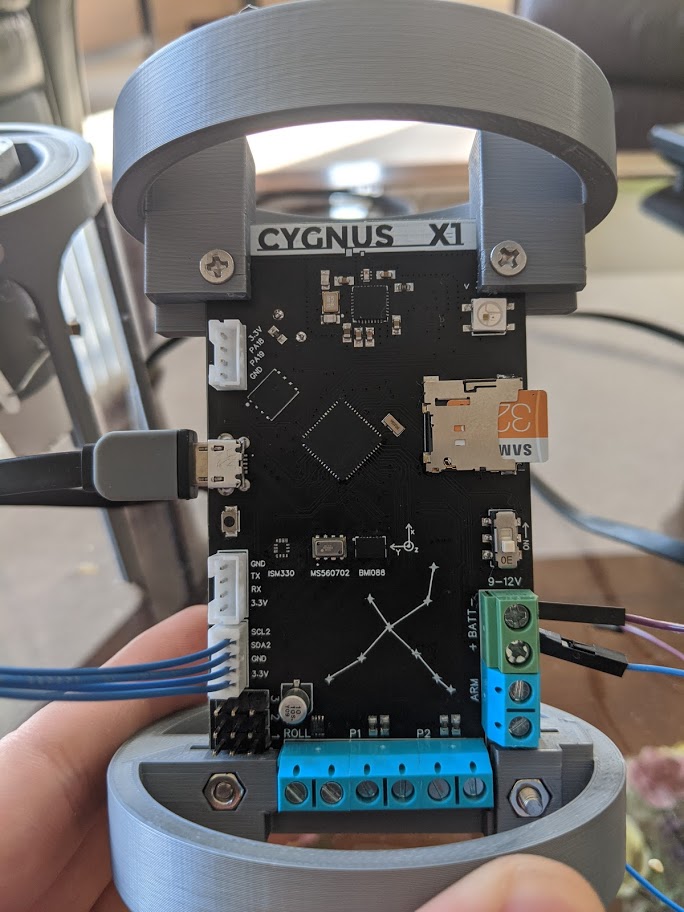
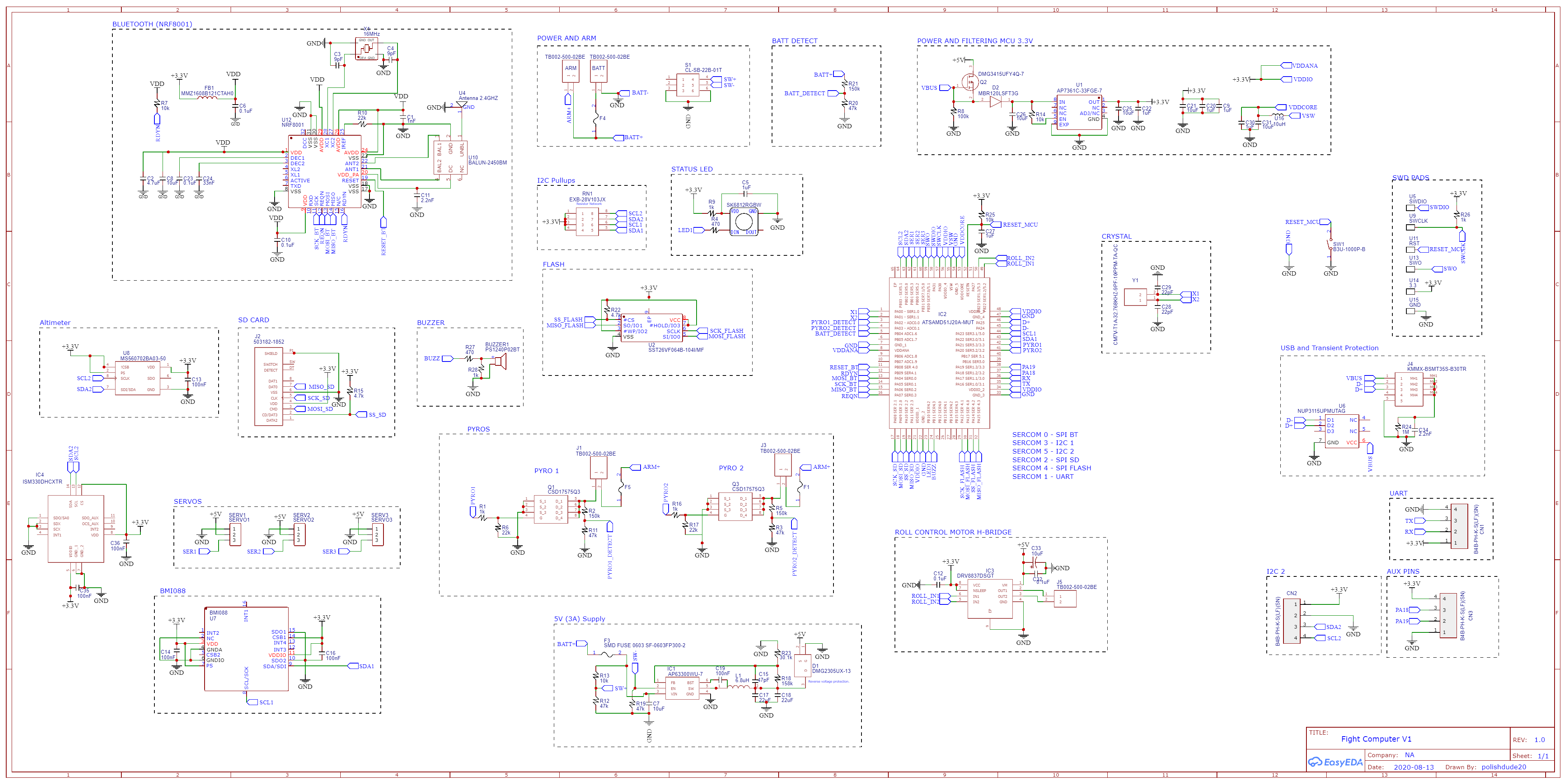
Project Cygnus-X1 develops an open board for thrust vector control jet engine and accompanying on-board systems. The board can be used by enthusiasts to stabilize the flight of homemade rockets. The developments of the project are distributed under the GPLv3 license. Available schematics, PCB layout and specification for EasyEDA (Electronic Design Automation) simulator.
The board is fully compatible with development environments Arduino IDE and Platformio. The software components are written in C ++. As a basis, the SAMD51 microcontroller is used, operating at a frequency of 120 MHz and having 1MB of built-in Flash memory. An external Flash or SD card can be used to record telemetry during flight. Data and commands are transmitted via Bluetooth Low Energy (BLE), which allows you to use a regular smartphone for control.
Three servo control channels are provided – two for the movement of the nozzle when the thrust vector changes and one for other systems, for example, to activate the parachute deployment. There are also two pyro channels for ignition and glow plugs, and an electric motor control channel for changing roll using the centrifugal wheel .
LiPo-batteries 2S or 3S are used for power supply. Among the sensors used are a six-axis hydrostabilizer (IMU BOSCH BMI088) and an altimeter (MS560702). UART and I2C connectors are available to connect additional sensors such as a GPS module.